@mandrillmitch
Forum Replies Created
Viewing 1 post (of 1 total)
Viewing 1 post (of 1 total)
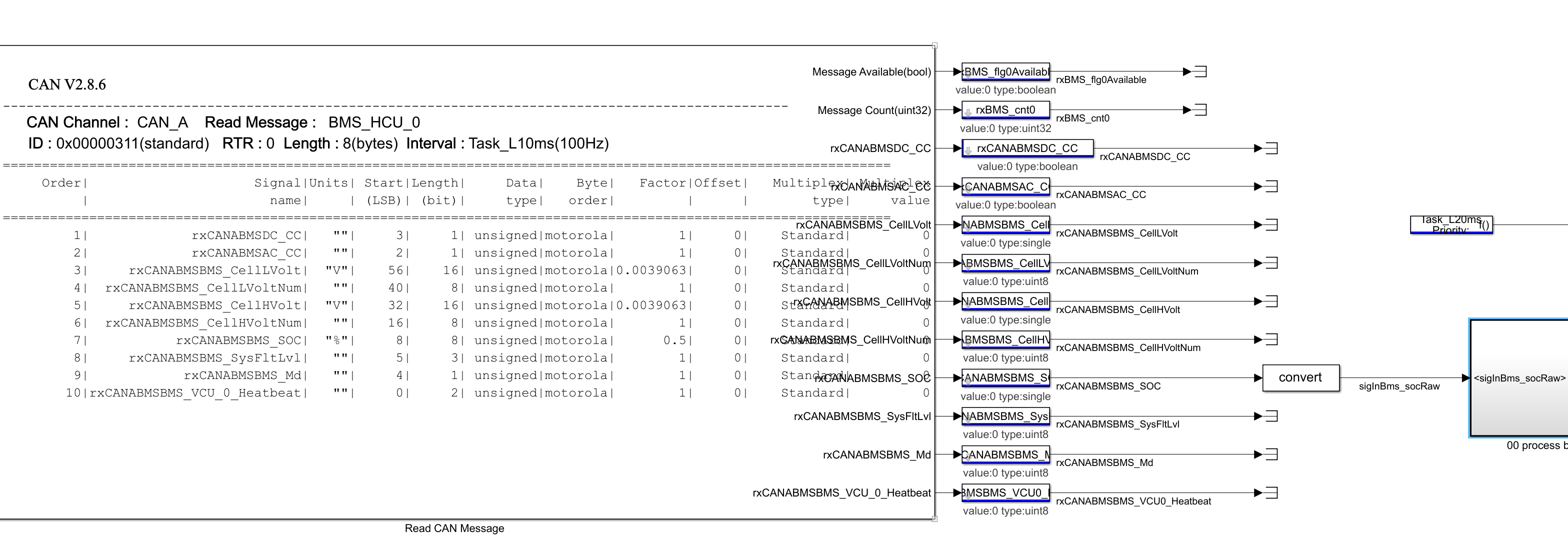
Another confusing thing is the reading of this CAN message (Fig.1)
The interval is L10ms, but the CAN message arrives at this block via interrupt.
– Does the block with these settings update the CAN values every 10ms even though they are received every 1ms?
– Do we also need a rate transition block because 10ms refresh and 20ms processing task?
In general, I do not receive all messages when I use a Read CAN Message Block. There is at least a 10% miss rate between the Read CAN Message Block and the actual messages on the bus.