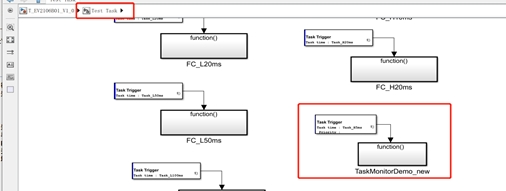
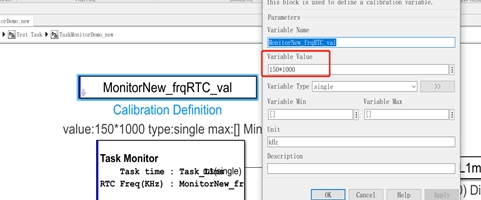
Task monitoring
Please reach out: support@ecotron.ai if your questions didn’t get replied.
- This topic has 3 replies, 2 voices, and was last updated 3 years ago by
 .
.
Viewing 4 posts - 1 through 4 (of 4 total)
Viewing 4 posts - 1 through 4 (of 4 total)
You must be logged in to reply to this topic.