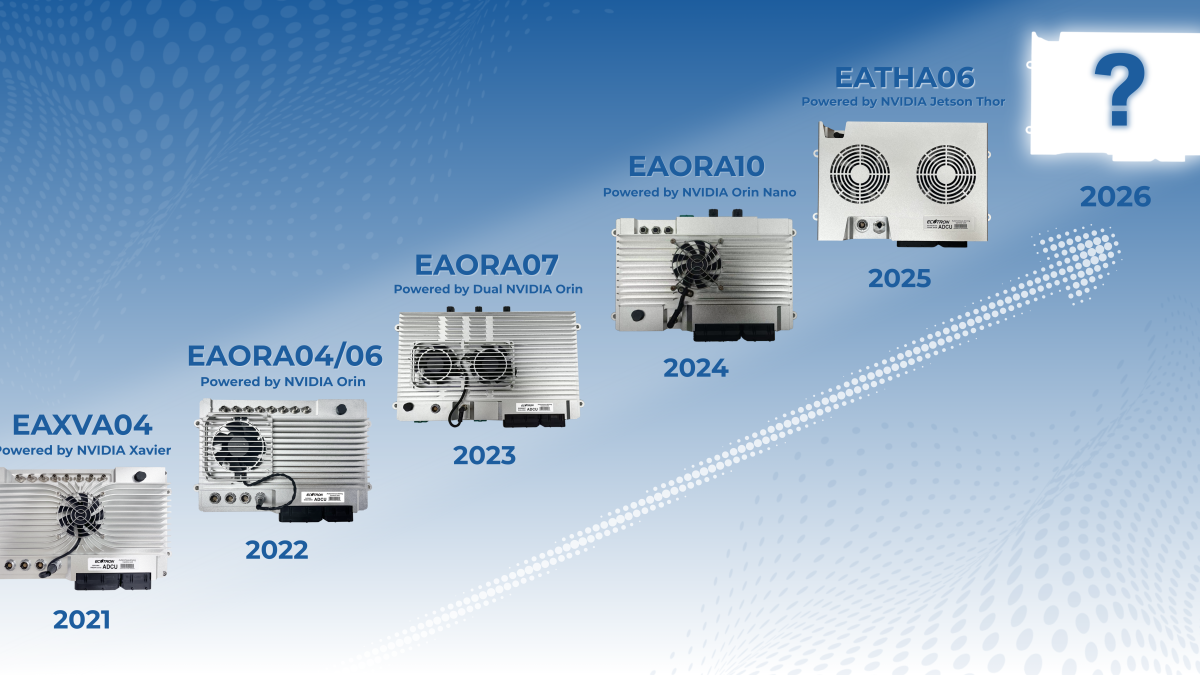
Ecotron’s ADCU Evolution: From Foundational Compute to Next-Generation Autonomy
At Ecotron, the evolution of Autonomous Driving Control Units (ADCUs) reflects a broader transformation in the autonomous driving industry—from isolated perception systems to fully integrated, high-performance computing platforms capable of supporting L4 and beyond.
As sensor density, autonomy levels, and real-time processing demands increase, ADCUs must deliver not only higher compute performance but also scalable architectures, robust interfaces, and functional safety.
Building the Foundation: EAXVA04 (2021)
Our journey began with the EAXVA04, powered by NVIDIA Jetson Xavier.
- Compute: ~32 TOPS
- Autonomy Level: L2–L3
- Architecture: CPU + GPU + DLA heterogeneous compute
- Safety: Infineon TC397 (ASIL-D capable)
- Interfaces: Multi-sensor support (camera, CAN, Ethernet, GNSS)
This platform enabled early deployments in controlled environments and laid the groundwork for scalable autonomous systems.
Read more about the EAXVA04 here.
Scaling Performance: EAORA04 & EAORA07 (2023)
With the introduction of NVIDIA Orin, we significantly increased compute density and system capability.
EAORA04
- Compute: ~200 TOPS
- Autonomy: L3–L4
- Sensor Fusion: GMSL2 cameras, automotive Ethernet
EAORA07
- Compute: 400+ TOPS (dual Orin)
- Autonomy: L3–L4+
- Architecture: Dual-SoC for parallel perception and planning
These platforms enabled real-time, high-throughput processing for complex driving scenarios.
Read more about the EAORA04 here and the EAORA07 here.
Optimizing for Scale: EAORA10 (2024)
To meet growing demand for cost-effective solutions, we introduced the EAORA10.
- Compute: 34–157 TOPS
- Autonomy: L3–L4
- Flexible configurations: Orin NX / Nano
- Compact design: Lower power consumption, IP67 protection
This platform made advanced autonomy more accessible for OEMs and developers.
Read more about the EAORA10 here.
A Breakthrough: Thor-Based Platform EATHA06 (2026)
The transition to NVIDIA Thor marked a new era in autonomous computing.
- Compute: 2000+ TFLOPS-class
- Autonomy: L3–L5
- GPU: Blackwell architecture with next-gen tensor cores
- Capabilities:
- Real-time multi-sensor fusion
- High-resolution perception
- Advanced AI model deployment
This platform enables unprecedented performance for compute-intensive applications such as autonomous mining, logistics, and robotics.
Read more about the EATHA06 here.
Looking Ahead: The Next Generation
We are now preparing to introduce our most advanced ADCU to date.
This next-generation platform builds on the Thor architecture with key advancements:
- Expanded sensor input capacity (up to 16 cameras)
- High-speed networking, including 10G optical communication
- Enhanced system redundancy and safety architecture
- Next-generation MCU integration
- Hybrid cooling for sustained high-performance workloads
Designed for L4–L5 autonomy, this platform represents a shift toward fully scalable, deployment-ready autonomous systems.
Shaping the Future of Autonomous Systems
From 32 TOPS to over 2000 TFLOPS, our ADCUs have evolved alongside the industry—continuously pushing the limits of performance, scalability, and reliability.
The next chapter is about more than compute.
It’s about enabling true autonomy at scale.
Coming April 2026.