
Autonomous Domain Control Unit
Introduction
Ecotron's autonomous domain control units are a cutting-edge platform with powerful computational capability tailored for Robotic Control system. The Robotic Control Unit receives data from multiple sensors, e.g. cameras, radars, LiDAR, and cloud data (V2X), and acquires robotic dynamic data from controllers so that it can support decision-making and route planning algorithms. The outputs of the Robotic Control Unit will be used for user status feedback, robotic control, and various autonomous features. Ecotron Robotic Control Unit can be customized according to customer robotic parameters and components input specifications.
EAXVA05: The Newest Generation of Robotil Control Unit Launched

Functions
EATHA06 — The Powerful NVIDIA THOR-Based Autonomous Driving Control Unit
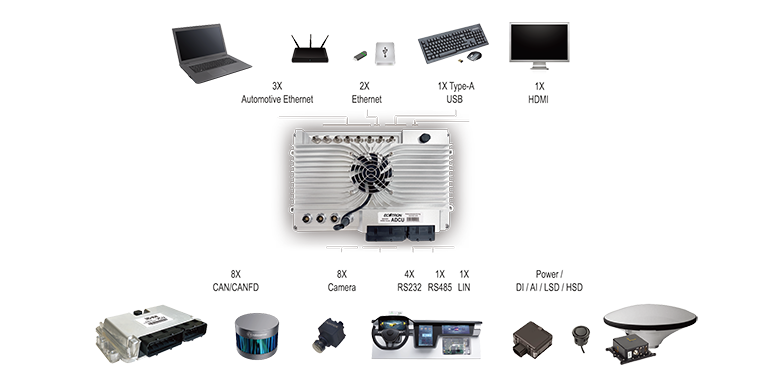
The EATHA06 is Ecotron’s most powerful Autonomous Domain Control Unit (ADCU) to date, purpose-built for Level 3–Level 5 autonomous driving systems. Powered by the NVIDIA THOR SoC and an ASIL-D–rated Infineon TC397 MCU, the EATHA06 delivers exceptional compute performance, functional safety, and reliability for next-generation autonomous platforms.
Designed with extensive automotive-grade connectivity, the EATHA06 supports Automotive Ethernet, high-speed camera interfaces, CAN FD/CAN, LIN, GPS, and IMU, enabling seamless integration with advanced sensor suites and vehicle networks.
Engineered for the future of mobility, the EATHA06 provides a scalable, high-performance foundation for the next generation of autonomous driving control systems.
EAORA04 – Based on Nvidia Jetson Orin
EAORA04-D is an intelligent computing platform developed by Ecotron, for robotic systems using NVIDIA Jetson Orin chip and Infineon TC297. Using the supporting basic software and development tools, developers can build an L4 low-speed autonomous robotic system in a safe, convenient, and efficient manner.
NVIDIA Jetson Orin is designed for embedded intelligent systems including robotic systems which can be used to implement robotic functions. Infineon TC297 is based on TriCoreTM architecture with a 300MHz operating frequency and an ECC (Error Correction Code) protected RAM with 728KB + 8MB capacity.
EAXVA05 - Based on Dual NVIDIA Jetson Xavier
Ecotron’s robotic control unit, EAXVA05, is an intelligent computing platform designed specifically for robotic systems. EAXVA05 is equipped with 2 NVIDIA Xavier chips and 1 Infineon TC297 chip. With basic software and development tools, developers can safely, conveniently, and efficiently build low-speed L4 robotic systems in confined areas.
NVIDIA designs Xavier specifically for embedded intelligent systems. Xavier supports robotic functions such as sensor fusion, environment perception, and path planning. Infineon TC297 has a TriCore™ architecture and has an operating frequency of 300MHz. Moreover, it has 728KB + 8MB capacity and ECC (error correction coding) RAM protection.
EAXVA04 - Based on NVIDIA Jetson Xavier
Powered by NVIDIA Xavier, Ecotron's EAXVA04 is suited for L3/L4 robotic systems. EAXVA04 is able to perceive and interpret the robotic surrounding environment via different kinds of sophisticated sensors with decent processing speed and high accuracy. It is capable of implementing advanced AI algorithms and robotic strategies for robotic control.
In addition, EAXVA04 supports multiple types of communication ports meeting the requirements of most autonomous robotic sensors available on market - LVDS channels of the robotic control unit can be used for vision-based applications. CAN bus and Ethernet ports provide capabilities for integrating radar, LiDAR and other sensors.

Local Development Tool Kit
Ecotron robotic control unit has a set of development tools installed on the local target, including gcc, make, CMake, catkin, Bazel and gdb debugger. Application developers can develop user space applications directly on the target controller.
EcoCoder-AI, Automatic Code Generation Tool
EcoCoder-AI is a powerful automatic code generation library added on MATLAB/Simulink that links directly to the target controller. EcoCoder-AI integrates automatic code generation, compilation and one-click generation of executable files. It can directly convert the Simulink models into an executable program for the target controller and download to the target controller. It enables the use of Simulink Library, and greatly facilitates controls engineers to graphically develop applications based on autopilot middleware.
Also, EcoCoder-AI enables the use of Simulink external mode to do on-the-fly calibration.
EAORA04 (Orin + TC297)
- Nvidia Jetson Orin & TC297
- 200 TOPS
- 8 CAN buses (Support Radar input)
- 8 HD Cameras
- Multiple I/O interfaces
EAXVA05 (Xavier + Xavier + TC297)
- NVIDIA Jetson Xavier * 2 & TC297TP
- 64 TOPS
- 10 CAN buses (Support Radar input)
- 12 HD Cameras
- Multiple I/O interfaces
EAXVA04 (Xavier+ TC297T)
| Interface Type | EAORA10 Orin + TC377TP |
EAORA07 Dual Orin + TC397XP |
EAORA04 Orin + TC297TP |
EAXVA04 Xavier + TC297TP |
| Video input | 8 channels, GMSL/GMSL2 | 12 channels, GMSL2/FPDLink III | 8 channels, GMSL2/FPDLink III | 8 channels, FPDLink III |
| Video output | 1 channel HDMI | 2 channel HDMI | 1 channel HDMI | 1 channel, 1 channel HDMI |
| USB | 1 channel, USB Host support USB 2.0, USB3.0, USB3.1 | 2 channels, USB Host support USB2.0, US3.0 and USB3.1 |
1 channel, USB Host support USB2.0, US3.0 and USB3.1 |
1 channel, USB Host support USB 2.0, USB3.0, USB3.1 |
| RS232 | 2 channels, 1 channel for debug |
8 channels, 2 channels for debug |
3 channels, 1 channel for debug |
4 channels, 1 channel for debug |
| Automotive Ethernet | 1 channel 100M, 1 channel 1G, 100Base-T1 |
12 channels, 100Base-T1/1000Base-T1 |
3 channels, 100Base-T1/1000Base-T1 |
3 channels, 1000Base-T1, 100Base-T1 |
| Standard Ethernet | 3 channels, 100BASE-T/1000BASE-T |
1 channel, 100BASE-T/1000BASE-T |
2 channels, 100BASE-T/1000BASE-T |
2 channels, 100BASE-T/1000BASE-T standard |
| CAN | 2+8 channels, 2 channels connected to SOC, 8 channels connected to MCU, CAN FD compatible, 2 of them with specific frame wake-up |
4+8 channels, 4 channels connected to SOC, 8 channels connected to MCU, CAN FD compatible, 2 of them with specific frame wake-up |
2+6 channels, 2 channels connected to SOC, 6 channels connected to MCU, CAN FD compatible, 2 channels with specific frame wake-up |
2+6 channels, 2 channels to SOC, 6 channels connected to MCU, CAN FD compatible, 2 channels with specific frame wake-up |
| LIN | 4 channels | 2 channels | 4 channels | |
| Digital input | 6 channels | 4 channels, 2 channels active high, 2 channels active low |
6 channels, 4 channels active high, 2 channels active low |
6 channels, 4 channels active high, 2 channels active low, |
| Analog input | 8 channels | 4 channels | 6 channels, 2 channels 5V voltage type, 2 channels 36V voltage type, 2 channels resistance type |
6 channels, 2 channels 5V voltage type, 2 channels 36V voltage type, 2 channels resistance type |
| Digital low-side output | 8 channels@250mA | 4 channels@250mA | 8 channels@250mA | 8 channels@250mA |
| Digital high-side output | 4 channels@1A | 4 channels@1A | 4 channels@1A | 4 channels@1A |
| 5V sensor power supply | 2 channels maximum current 100mA | 2 channels maximum current 100mA | 2 channels maximum current 100mA | 2 channels maximum current 100mA |



