Autonomous Domain Control Unit
Introduction
Ecotron's Autonomous Domain Control Units (ADCUs) are advanced high-performance computing platforms designed to support complex autonomous systems and intelligent vehicle architectures. The ADCU integrates and processes data from multiple sources, including cameras, radars, LiDAR, and cloud-based connectivity (V2X), while also collecting dynamic system data from onboard controllers. This enables real-time data fusion, situational awareness, decision-making, and execution of advanced autonomous functions.
The ADCU provides outputs for system monitoring, status feedback, control functions, and a wide range of intelligent automation capabilities. Ecotron's ADCUs can be customized to meet customer-specific requirements, including hardware configurations, software architectures, sensor suites, and interface specifications.

Functions
EATHA06 — Based on NVIDIA Jetson Thor
The EATHA06 is Ecotron’s most powerful Autonomous Domain Control Unit (ADCU) to date, purpose-built for Level 3–Level 5 autonomous systems. Powered by the NVIDIA THOR SoC and an ASIL-D–rated Infineon TC397 MCU, the EATHA06 delivers exceptional compute performance, functional safety, and reliability for next-generation autonomous platforms.
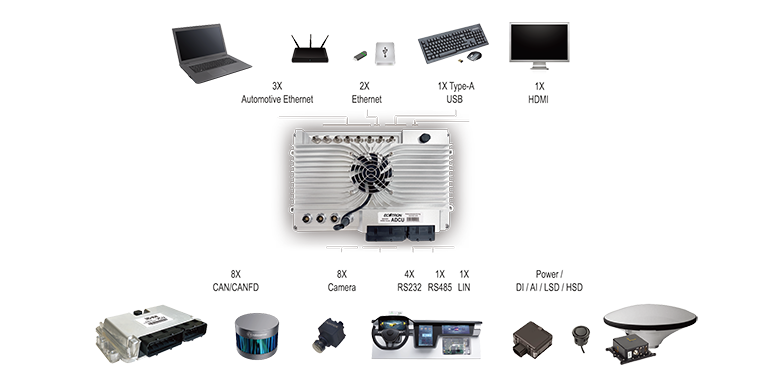
Designed with extensive automotive-grade connectivity, the EATHA06 supports Automotive Ethernet, high-speed camera interfaces, CAN FD/CAN, LIN, GPS, and IMU, enabling seamless integration with advanced sensor suites and vehicle networks.
Engineered for the future of mobility, the EATHA06 provides a scalable, high-performance foundation for the next generation of autonomous control systems.
EAORA06 – Based on NVIDIA Jetson Orin
EAORA06 is a high-performance Autonomous Domain Control Unit (DCU) developed by Ecotron, powered by NVIDIA Jetson AGX Orin and Infineon TC397. Designed for advanced autonomous and intelligent systems, it delivers powerful AI computing, real-time sensor fusion, and robust control capabilities.
Supporting cameras, radar, LiDAR, GNSS, Ethernet, CAN FD, and other system interfaces, EAORA06 enables efficient perception, decision-making, and system control. Combined with Ecotron's software ecosystem and development tools, it provides a scalable platform for next-generation autonomous applications.

Local Development Tool Kit
Ecotron robotic control unit has a set of development tools installed on the local target, including gcc, make, CMake, catkin, Bazel and gdb debugger. Application developers can develop user space applications directly on the target controller.
EcoCoder-AI, Automatic Code Generation Tool
EcoCoder-AI is a powerful automatic code generation library added on MATLAB/Simulink that links directly to the target controller. EcoCoder-AI integrates automatic code generation, compilation and one-click generation of executable files. It can directly convert the Simulink models into an executable program for the target controller and download to the target controller. It enables the use of Simulink Library, and greatly facilitates controls engineers to graphically develop applications based on autopilot middleware.
Also, EcoCoder-AI enables the use of Simulink external mode to do on-the-fly calibration.