Choosing the Right Low Cost ADCU: EAORA10 (Orin Nano) vs. EAT4A01G (TDA4)
When selecting an advanced ADCU automotive controller, two standout options are the EAORA10, powered by NVIDIA’s Orin Nano/NX, and the EAT4A01, built on Texas Instruments’ TDA4VM. Both controllers share a similar design by pairing both with a high-performance SoC with a safety-rated MCU, but the performance characteristics, I/O capabilities, and ideal application targets differentiate these controllers significantly. The purpose of this piece is to compare the cost comparison between two effective ADCU controllers here at ECOTRON to help consumers understand the technical trade-offs, cost drivers behind each, and focus product selections based on project goals and budget.
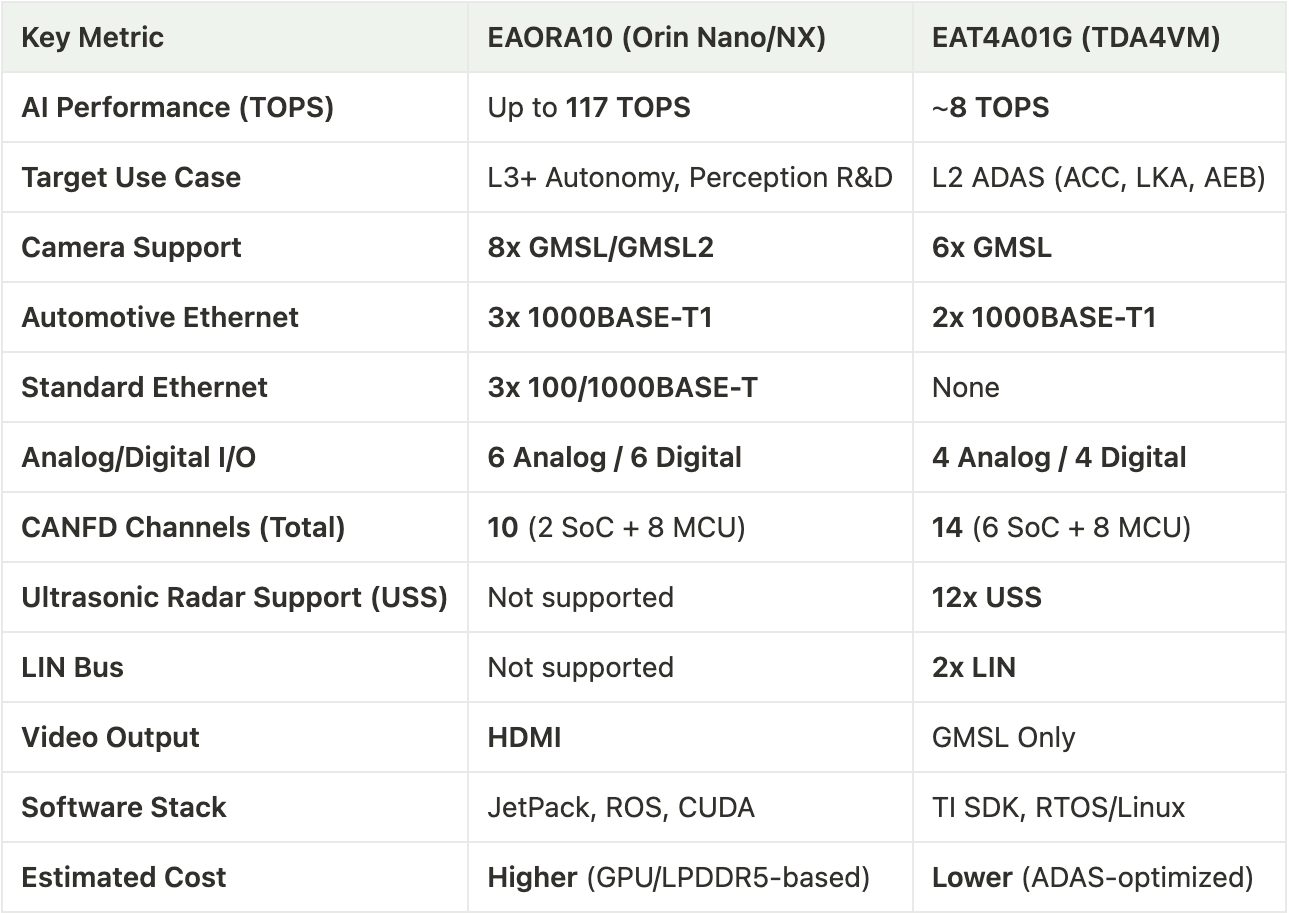
The most critical distinction lies in their processing performance. The EAORA10 leverages NVIDIA’s Orin Nano/NX, capable of delivering up to 117 TOPS of AI processing power. This makes it particularly suitable for compute-intensive tasks such as multi-camera perception, object detection, and advanced autonomy research and development. In contrast, the EAT4A01 is based on TI’s TDA4VM, offering around 8 TOPS of AI performance. While lower in raw AI throughput, the TDA4 is designed for production-grade ADAS tasks like adaptive cruise control (ACC), lane keep assist (LKA), and automatic emergency braking (AEB), where efficiency, reliability, and cost-effectiveness take precedence over GPU-heavy inference.
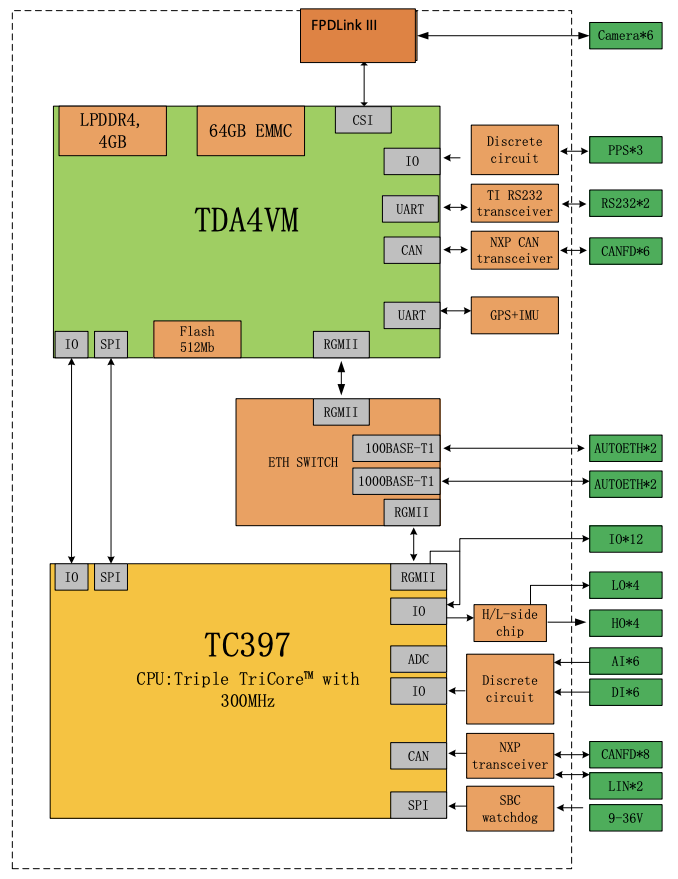
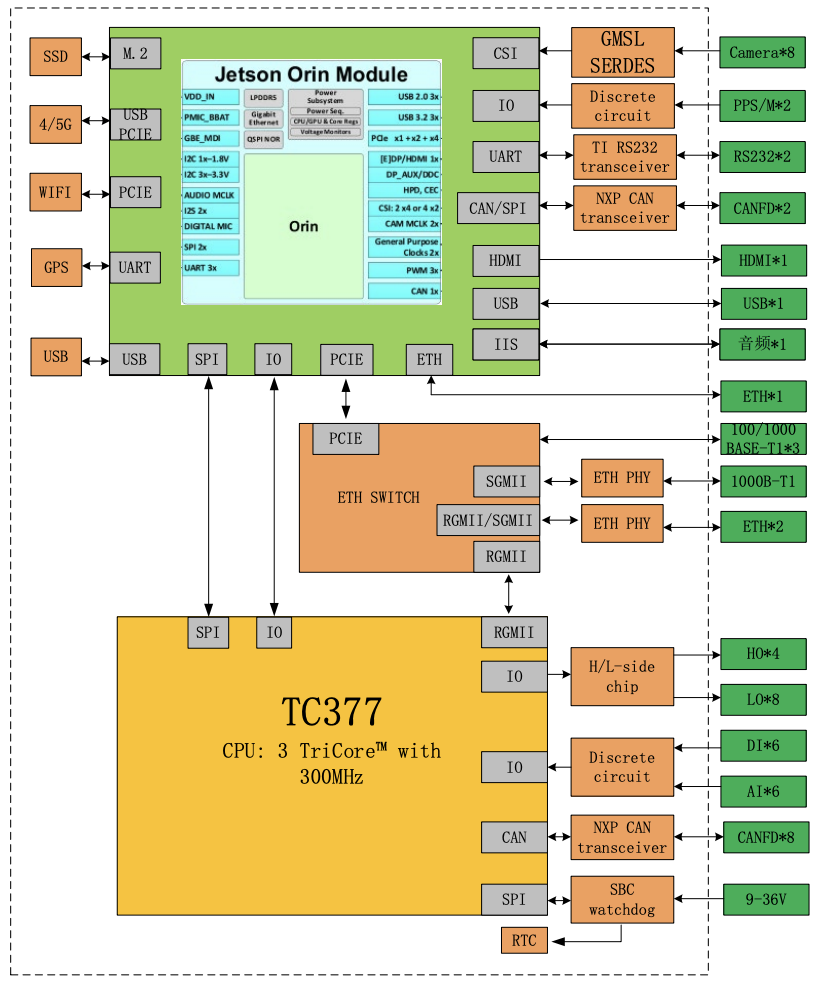
In terms of safety architecture, both platforms integrate Infineon ASIL-D certified MCUs; the EAORA10 with the TC377 and the EAT4A01 with the TC397. These microcontrollers handle real-time deterministic control and functional safety logic. Although both are robust, the TC397 offers slightly more performance, which may help applications requiring tighter safety loops or more comprehensive diagnostic coverage.
Connectivity is another area where the EAORA10 distinguishes itself. With support for 8x GMSL/GMSL2 camera inputs, multiple Gigabit Ethernet ports (including 3x 1000BASE-T1 and 3x 100/1000BASE-T), more digital and analog I/O channels, and 4x high-side drive outputs, the EAORA10 is built for sensor-rich, flexible deployments. In contrast, the EAT4A01 supports 6x GMSL cameras, 2x 1000BASE-T1 Ethernet, and includes features more aligned with traditional automotive systems—such as 12x ultrasonic radar (USS) inputs, 2x LIN interfaces, and PPS_OUT for synchronization. It also includes more CANFD ports on the SoC (6 vs. 2), which may be beneficial in CAN-heavy vehicle networks.
The software ecosystems further reinforce the different intended uses. EAORA10 taps into NVIDIA’s JetPack SDK, CUDA, TensorRT, and offers strong integration with ROS whic is a clear advantage for developers focused on AI, computer vision, or robotic autonomy. On the other hand, EAT4A01 is backed by TI’s mature software stack, including RTOS, Linux, and QNX options. This makes it particularly well-suited for real-time, safety-critical ADAS applications and helps streamline paths toward ISO 26262 certification.
Cost and production considerations are also key differentiators. The EAORA10’s use of Orin Nano/NX and LPDDR5 memory significantly increases its bill of materials (BOM), but the investment is often justified for systems requiring advanced compute and neural network inference. Meanwhile, the TDA4VM offers a balanced architecture with lower power consumption, more moderate memory requirements, and a smaller cost footprint which can be ideal for mass-market ADAS features in L2/L2+ production vehicles.
So, which controller is right for you? The EAORA10 is the best fit if you’re developing for Level 3 & 4 autonomy, working with multi-sensor fusion, or building AI-heavy applications that depend on deep learning inference and GPU acceleration. It’s also ideal if your team works within NVIDIA’s ecosystem, especially with ROS or CUDA, or if your design requires expandability and high-speed interfaces such as HDMI and Gigabit Ethernet.
In contrast, the EAT4A01 is well suited for teams developing cost-sensitive L2+ ADAS solutions, especially where ultrasonic radar, LIN support, or ISO-oriented software paths are needed. It’s a strong choice for those already embedded in TI’s development ecosystem or integrating into legacy automotive sensor networks where power efficiency and production-readiness are key.
While the EAORA10 and EAT4A01 may appear similar in physical design, their underlying capabilities and ideal applications are quite different. The EAORA10 is a powerful, flexible controller tailored for advanced R&D and autonomous driving functions. The EAT4A01 is a purpose-built, cost-effective platform for production-grade ADAS at scale. That’s why we compared not only their features but also the cost factors between the two. Ultimately, your system’s computational needs, I/O complexity, and production goals should drive your decision between these advanced controllers.