Essential Technologies for Autonomous Driving Computation Platform
Key technologies of autonomous driving include hardware, software, system function safety, vehicle telecommunication, autonomous driving algorithm, architecture of cloud sever, central control unit and cloud control unit. As the brain of autonomous vehicle, central controllers (vehicle control unit) is generally considered as one of the most important technologies.
Intelligent Connected Vehicle (ICV) is a nova in automotive industry. The development of ICV not only reshapes the automotive industry, but also influences other related fields including the progress and development of Internet of Things (IoT).
Vehicle Computation Platform
With the development of ICV, automotive systems are more sophisticated, and the timing constrains are stricter. Thus, conventional distributed electric-electronic architecture based on CAN bus no longer satisfies the future demand from ICV. The integrated network with multi-domain control becomes the optimal choice for the development of intelligent vehicles. In addition, such architecture is necessary for complex functionalities, high-rate communication, and system security.
The Society of Automotive Engineering (SAE) categorizes autonomous driving technologies by levels. Autonomous driving with L2 or lower generally has a distributed controller architecture based on Micro Control Units (MCUs), while L3 and above need to have a SoC-based and high-performance integrated control strategy.
Domain Control Unit (DCU), integrating with high-performance computation unit such as Central Processing Unit (CPU) and Graphics Processing Unit (GPU), greatly improves its performance and computational power. Such DCU can be used for parallel computing and replacing some of the distributed controllers, which may simplify the system.
In the future, a more integrated and more powerful solution, Mobile Data Center (MDC) might be developed based on DCU.
Key Technologies for Autonomous Driving Domain Control Unit
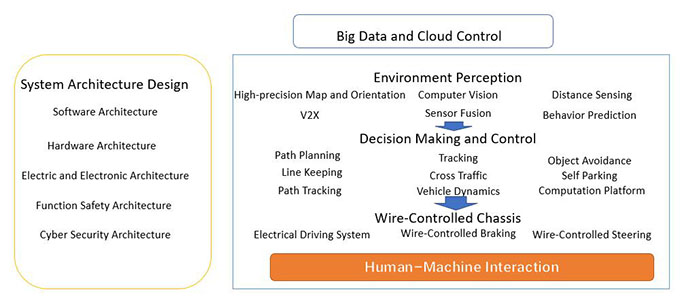
Autonomous Driving Domain Control Unit takes the environmental perception, GPS data, real-time vehicle data and V2X as inputs. Then combined with positioning, plaining and vehicle dynamics control, the controller controls driving, transmission, steering, braking and other behaviors to materialize autonomous driving. Meanwhile, it utilizes instrument clusters and display screens for human-machine interaction.
To meet high performance and safety standards, the design of DCU is strict in hardware/software, system function safety, communication/data transfer, cloud computing and control algorithms.
Key Technology for Basic Hardware
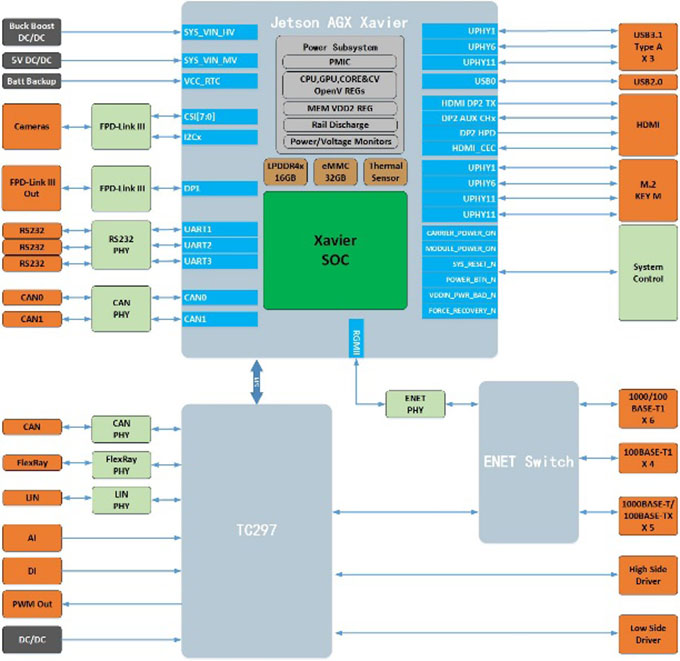
The architecture of DCU is shown in Figure 2 and high-performance sensors will collect environmental data such as road conditions. The SoC will take data as input and implement environmental perception, planning, decision making and other algorithms.
Currently, a redundant controller is generally added for fault detection to achieve the safety regulation ASIL D.
Computational platform for autonomous driving needs great performance to process data from camera, lidar, radar, locating system, high precision map. Based on the information, it conducts environmental perception, planning, and vehicle dynamics control.
Requirements need to be satisfied for autonomous driving hardware:
- High computational power for real-time computation
- Satisfy the function safety requirement of ISO 26262
- Cybersecurity Concerns
- Support multiple communication protocols (CANFD, Ethernet, etc.)
- Firmware-over-the-air (FOTA) Capability
- Automotive-class operation conditions
- Low power consumption
- Cost effective
Electrical and electronics architecture
Autonomous driving computational platform is based on multilayer Adaptive AUTOSAR, in which various applications can be integrated.
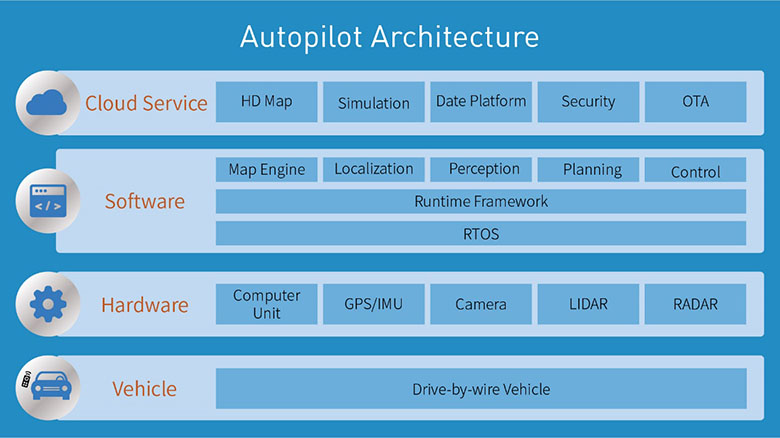
The ‘upper’ layer of computation platform is application layer, on where control algorithm and safety management features (such as environmental perception, planning and vehicle control) are run. Meanwhile, the application layer also implements function safety and cybersecurity features, such as fault detection, cybersecurity strategy, processor monitoring and corrective actions.
The ‘lower’ layer is basic software to implement communication, Input/Output driver, fault management, hardware safety management and memory management and other features. A Real Time Operation System (RTOS) with POSIX interface runs in this layer and allocates hardware resources to keep the integrity of multi-software systems.
POSIX Interface
LINUX system is preferred on RTOS systems for the customizability offered by open-source software.
Adaptive AUTOSAR Technology
Adaptive AUTOSAR is a new standard made for the performance requirements addressed by autonomous driving technology. As mentioned above, the autonomous driving features introduced new challenges to electrical/electronic panorama. They are much more sophisticated and require significant computing power.
Hypervisor
The autonomous driving DCU should cover environmental perception, sensor fusion, decision making and other fundamental functionalities. With the increasing demand on cybersecurity and functional safety, a higher performance requirement is addressed for the software/hardware of controller unit.
To resolve this problem, a hypervisor layer is embedded between hardware architecture and Operating System (OS). Based on hardware abstraction layer, the hypervisor layer runs multiple operating systems to resolve the resource confliction.
Hypervisor is the core of virtual technology, which makes it possible to run multiple operating systems and applications on a single hardware. Thus, it is also considered as a “hardware virtual machine”.
System Safety Platform
While the interconnection of intelligent vehicles brings passengers convenience, it also records drivers’ privacy and personal information. Furthermore, the vehicle can be controlled remotely, which is a potential risk for cybersecurity. Meanwhile, the large number of sensors, controllers, and actuators required by the autonomous driving features increase the system complexity and risk of fault. In addition, the vehicle should maintain manipulatable under system error. As a result, cybersecurity and system functional safety became key technology for autonomous driving.
Functional Safety
Currently, functional safety requirement mainly follows ISO 26262 Standard, which describes hardware random fault, potential fault, multipoint fault, and software fault injection test of the electrical/electronic (E/E) system. Customized solutions for automotive risks, operating automotive safety level requirements to discover potential risks, and ensure that the safety level meets the specified requirements according to the requirements, emphasizing the product life cycle and safety integrity level requirements. Fault of E/E systems can lead to abnormal system functionality, which may cause unpredictable dynamic behavior of the vehicle. Automotive Safety and Integrity Level (ASIL) can be derived by hazard analysis and risk assessment. Based on the ASIL level, proper safety requirements should be achieved to minimize the risk of hazard caused by system faults. For a fail-operational autonomous driving system, redundant system may be necessary for certain safety level.
At the same time, autonomous driving automotive is a highly complicated system with top-tier technology and proving the functionality of the system (Safety of the Intended Function, SOTIF) can be sophisticated. SOFIT identified failure includes environmental perception error caused by unexpected corner case, wrong decision caused by function/logic judgement, motion control deviation caused by inadequate actuation.
Cybersecurity
Intelligent vehicles are interconnected by wireless communication network and cloud data base. The interconnection makes intelligent vehicles vulnerable to all cybersecurity risks faced by general computers. Not only does those risks related to data and property loss, but passengers’ safety. Thus, cybersecurity is especially important for intelligent vehicles. The cybersecurity hazard analysis for intelligent vehicle should be conducted in the fields of vehicle external communication, service segregation, internal communication, and controller architecture. From external to internal, constructing the four layers of protection to minimize the chance of cybersecurity issue.
Cybersecurity for Intelligent Connected Vehicle is a fundamental subject for automotive industry in the future. The government and organizations should lead the effort to emphasize the importance of cyber security for ICV.
Key Technologies for Vehicle Telecommunication Platform
V2X combines vehicle, passenger, road, cloud data together by various wireless communication technologies to provide more information for environmental perception purpose. V2X is a necessity for intelligent connection. By application development, V2X offers an eco-system for ICV and servers autonomous driving, efficient commuting, traffic management, remote monitoring, and other functions. As defined by 3rd Generation Partnership Project (3GPP), V2X technology includes vehicle to vehicle (V2V), vehicle to passenger (V2P), vehicle to network (V2N), vehicle to cloud (V2C) and other scenarios. Currently, the research focus for V2X is on cellular V2X (C-V2X), which includes the application of LTE-V2X and the development of NR-V2X.
V2V is the communication between vehicles carried by on-vehicle terminals. One common application is urban traffic and highway, on which vehicles can have real-time data and message sharing.
DCU for autonomous driving can transfer or receive the following data: vehicle speed, vehicle position, steering, acceleration, braking and even images from cameras. Based on the shared data, vehicle can analyze and predict the behavior of other vehicles. Furthermore, the vehicle can conduct active safety strategy to reduce the risk of accident.
V2I refers to the communication between vehicle and road-side infrastructure (traffic light, camera, measurement units, etc.). Infrastructures collects environmental data and broadcasts real-time information. V2I is helpful in real-time information service, traffic monitoring, and non-stop fee collection.
Autonomous driving DCU need to analyze the information from road-side infrastructures, such as blind spot collision on crossroad, accidents, construction, emergency vehicles, traffic jam and accident warning. Such information should be passed to driver and corresponding driving strategy should be provided.
V2P refers to the communication between vehicle and vulnerable entities on road (pedestrian, cycler, etc.). The remote devices (smart phone, wearable device, GPS locaters, etc.) carried by those entities communicates with on-vehicle terminals to provide location and behavioral information. V2P is mainly applied for transportation safety, smart key, location services, and shared economies.
Autonomous driving DCU supports keyless entry, remote start and other functions by secure communication. In addition, thanks to the great computing power, it can predict the passengers’ motion and instruct drivers to avoid traffic accidents.
V2N/V2C refers to the communication between vehicle to cloud services by networks. Vehicle and cloud platform exchange, store, and process data. Based on V2N, various functions such as traffic notification, entertainment, business services and vehicle management can be implemented. V2C are also used for navigation, remote monitoring, emergency services, and entertainment.
To implement V2N features, high computational power and rapid data storage are required for autonomous driving DCU, since high processing rate, large amount of data input/output, high reliability and extra low lagging network are necessary.
Cloud Computing Platform
Nowadays, cloud computing platforms are mainly used for processing services and data analysis without hard timing constraints, such as digital entertainment and driving behavior analysis. Vehicle uploads controller data to cloud platform through network. Then, the cloud platform performs data storage, data mining, and data analysis. The result will be sent to vehicle for better user experience.
Core Algorithm Development
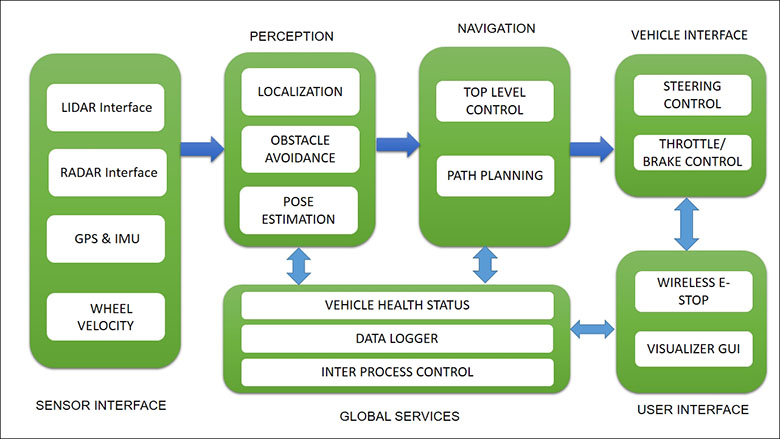
The core algorithm for autonomous driving includes environmental perception, positioning, decision making, planning, control, and execution.
Environmental Perception and Positioning
The purpose of environmental perception is to collect information of vehicle, surrounded obstacles, road, and driving objective by using on-vehicle sensors (such as camera, radar, lidar, ultrasonic sensors and differential GPS). Data about obstacles and road conditions can be obtained by various sensors. A sensor fusion derived data utilizes the advantages of different sensors. Compared to single sensor approach, sensor-fusion based method is more stable, more accurate and more robust.
Sensor Fusion Algorithm
Machine-learning based approaches are generally used for object detection and tracking in environmental perception systems. Deep learning is used for processing data from cameras, lidar, and radar. To meet the timing constraints and computation demand of machine-learning based approach, high-performance processors are necessary.
Software Architecture Design for Multisource Information Fusion
Multisource Information fusion software covers sensor calibration, coordination change, data collection, data perception, storage buffer, information fusion, object detection, object tracking, network coordination optimization, environmental model construction and other modules. Software packages are designed in object-oriented programing to achieve object detection, object tracking and environmental modeling. The abstract class library can be used for developing the abstract interface classes, realizing the modular design of data, device drivers, software algorithms, which provide convenience for function expansion and deice replacement for the basic software platform of ICV multi-source information fusion perception system.
Machine-learning based Algorithm
Generally, environmental perception systems apply machine learning based methods for object detection and tracking. Related processes involve robust point-cloud registration in complex urban environments, multi-perspective environmental modeling for autonomous driving, evidence-based sensor fusion that supports vector machine, and deep-learning based computer vision radar fusion method.
High Precision Positioning
Centimeter level real-time positioning is one of the biggest challenges for autonomous driving. It consists of relative positioning, absolute positioning, and combined positioning. For autonomous driving, combined positioning is the most common. Common approaches include Real Time Kinematic (RTK) – GPS, Inertial Measurement Unit (IMU) and Simultaneous Localization and Mapping (SLAM). Combined positioning derives rough locations by RTK-GPS. Then, it measures the vehicle dynamic parameters such as initial position and direction to locate the vehicle behavior. Finally, it utilizes lidar or computer vision to percept the environment. Finally, it uses passive or active label to mark the surrounding and compares with the high precision map for high precision positioning.
Decision Making and Planning
Intelligent driving planning is a key technology for autonomous driving. Intelligent driving is the process of moving the vehicle from origin to destination. Constrained by road conditions and vehicle performance, the optimization takes distance, collision, and feasibility from a perspective of vehicle perspective.
Planning involves three aspects: path planning, maneuver planning, and trajectory planning. Each aspect implements distinctive algorithm for different objectives.
The overall route planning is to get the optimal rotate from origin to destination by digital map, road network and traffic information. The sensor data for this subject mainly comes from GPS and digital map.
The maneuver planning is to make the optimal decision that complies with regulations and road constrains based on road condition and surrounding traffic. In this aspect, dynamic planning approaches are implemented to the local roads to find the optimal overall path. In this process, the date is collected by radar and camera to identify obstacles, signs, traffic lights, and lane lines.
Trajectory planning is to determine an optimal sequency of motions to complete the current objective under given environment and traffic. Besides external information, trajectory planning also requires evaluation of vehicle dynamics and status.
The main objective of path planning is to find a feasible and collision-free path based on digital map. Path planning derives the route of motion that optimizes one key performance parameter, while satisfying all physical constrains. This technology is relatively mature for digital map developers.
Maneuver planning is to find an ideal non-collision path based on local environmental data and vehicle status during the motion of ICV. The key process for maneuver planning is to draw an “obstacle map” that includes collision risk and potential risk based on object detection and object trajectory prediction. The main challenge for maneuver planning is to have a deep “understanding” of the surrounding environment in real-time. Grid-map is often constructed as a precise and reliable real-time environment model.
A variety of research has been conducted for decision-making. However, the human-like decision-making still cannot be mimicked maturely. There is some research on decision-making conducted based on deep reinforcement learning. In this approach, the human drivers’ behaviors are collected as training data for reinforcement learning model. The trained AI is capable of conduct decision-making process when facing untrained situations.
Control and Actuation
Vehicle motion control is the basis for the real implementation of autonomous driving. The power control and chassis ensure the vehicle to drive smoothly and comfortably. Meanwhile, the accurate handling and maneuver required by autonomous driving rely on the vehicle dynamic control.